Sú vlícovacie body stále potrebné pri moderných metódach mapovania?
V dnešnej dobe moderných geodetických technológií, akými sú laserové skenovanie (LiDAR) a fotogrametria z dronov, sa často diskutuje o tom, či sú vlícovacie body (GCP – Ground Control Points) stále nevyhnutné. Tieto body slúžia na presné georeferencovanie a zvýšenie presnosti získaných dát, no ich rozmiestnenie a zameranie je časovo náročné.
Zatiaľ čo terestrické laserové skenovanie si vo väčšine prípadov stále vyžaduje vlícovacie body na spojenie jednotlivých skenov do jedného celku, letecké LiDAR systémy a moderné RTK drony čoraz viac umožňujú zbierať presné dáta bez potreby fyzických referenčných bodov.
V tomto článku budeme analyzovať a porovnávať mračna bodov získané rôznymi metódami laserového skenovania bez využitia vlícovacich bodov.
Aké metódy zberu údajov sme použili?
Pozemné laserové skenovanie
Letecké laserové skenovanie
Fotogrametria
1. Pozemné (Terestrické) laserové skenovanie
Použitý prístroj: statický skener Trimble X7 umiestnený na statíve.
Počet stanovísk: 31
Spracovanie dát: na prepojenie jednotlivých stanovísk boli využité vlícovacie body, mračno bolo spracované v softvéri Trimble Perspective
REFERENČNÉ MERANIE – pri porovnaní slúžilo ako etalón
2. Letecké laserové skenovanie
Použitý prístroj: DJI Matrice 350RTK so zariadením LiDAR DJI Zenmuse L1
Použitý prístroj: DJI Matrice 350RTK so zariadením LiDAR DJI Zenmuse L2
Výška letu: 60m
Spracovanie dát: DJI Terra
3. FOTOGRAMETRIA
Použitý prístroj: DJI Mavic 3 Enterprise s 20 Mpx kamerou
Výška letu: 90m
Spracovanie dát: Agisoft Metashape Professional (spracovanie len kolmých fotiek – Ortho, kombinácia kolmých a šikmých fotiek – Oblique)
Výstupom zo všetkých uvádzaných metód je mračno bodov v súradnicovom systéme S-JTSK realizácie JTSK (EPSG kód: 5514) a výškovom systéme Bpv (EPSG kód: 8357).
ako sme porovnávali rôzne metódy zberu dát?
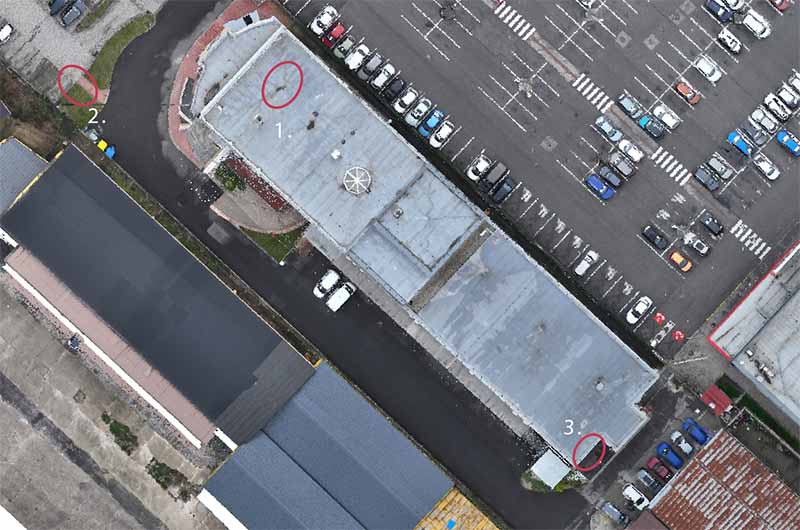
Na mapovanom území sme vybrali tri miesta (rovná plocha na streche, chodník a rímsa strechy) na porovnanie mračien bodov získaných rôznymi metódami. Ako referenčné mračno sme použili údaje z terestrického skenera. V CloudCompare sme vykonali vzdialenostnú analýzu, kde sme porovnali referenčné mračno s mračnami bodov z iných metód zberu údajov. Výsledky sú prezentované formou vizuálnej a číselnej interpretácie.
Obr. 1 – Lokalizácia analyzovaných miest
Aké grafické výsledky preukázala vzdialenostná analýza?
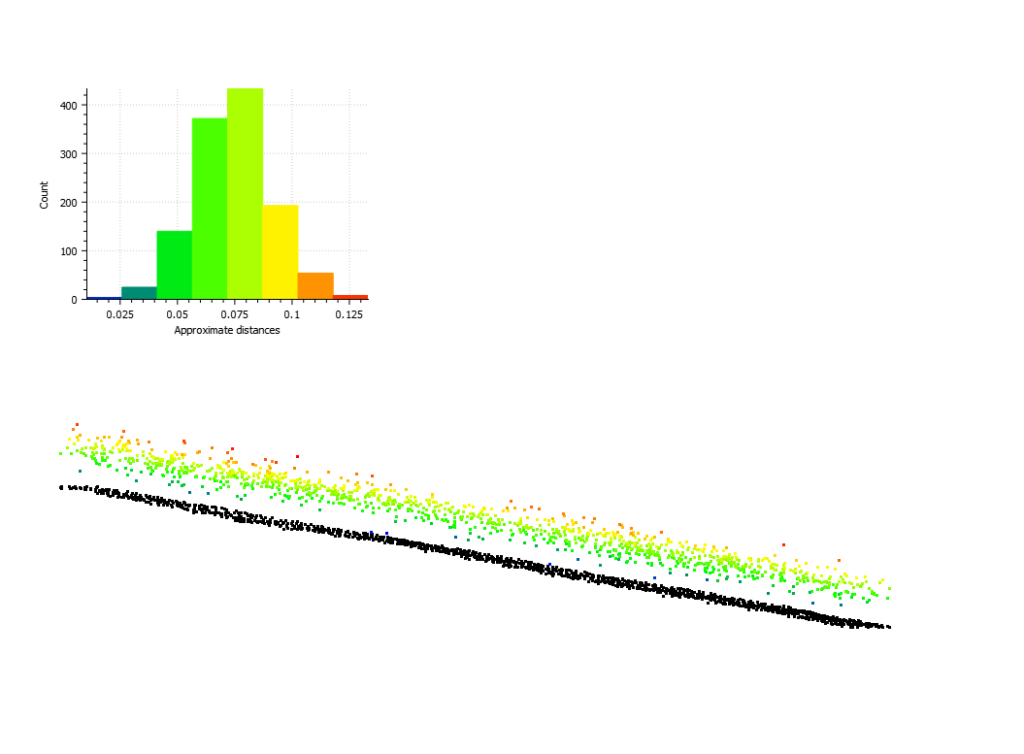
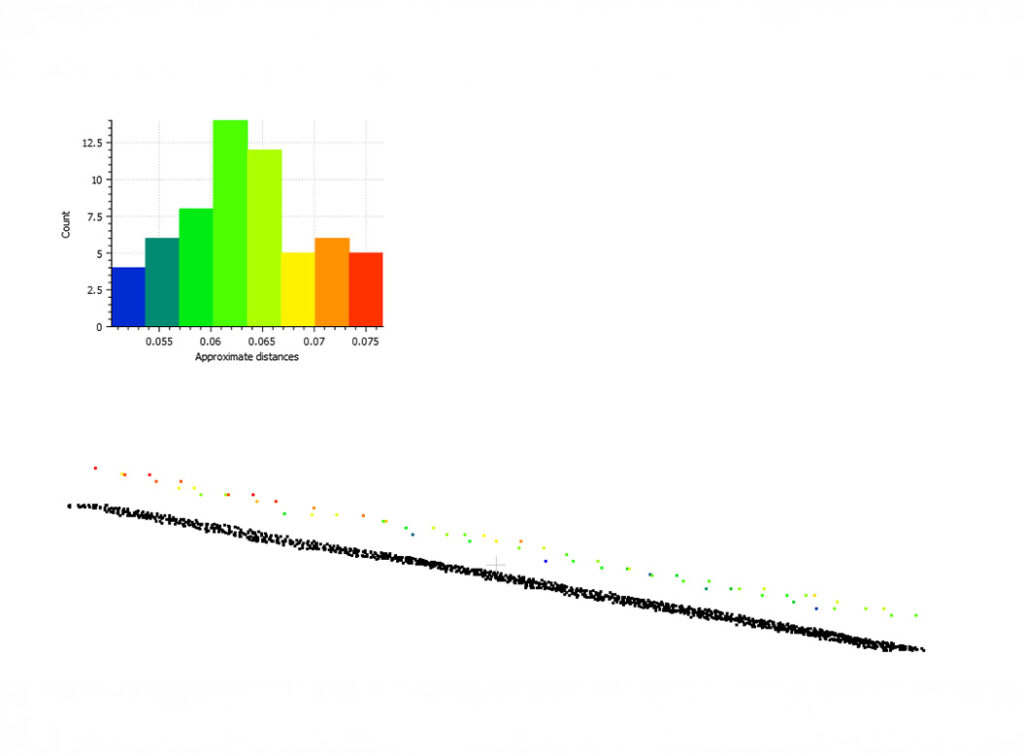
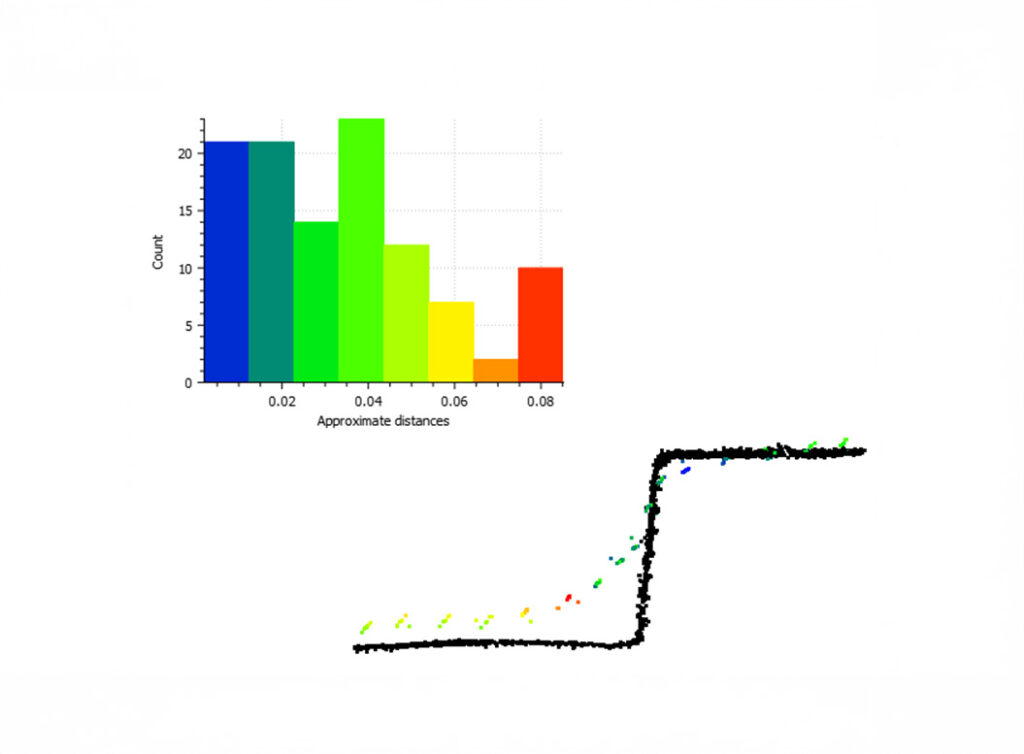
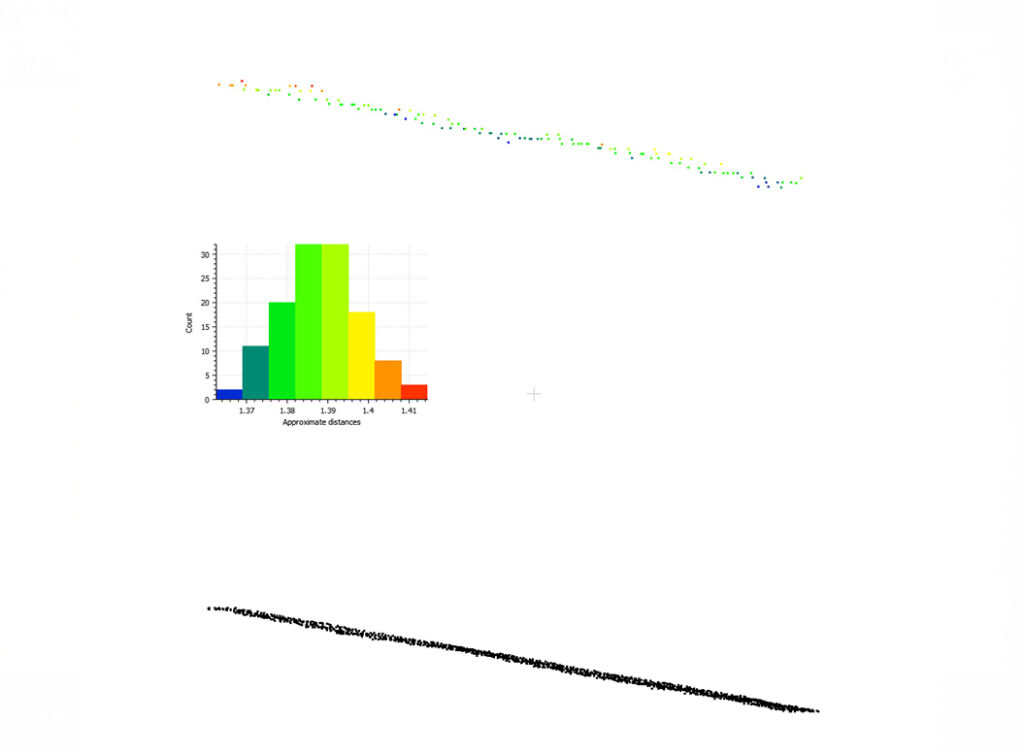
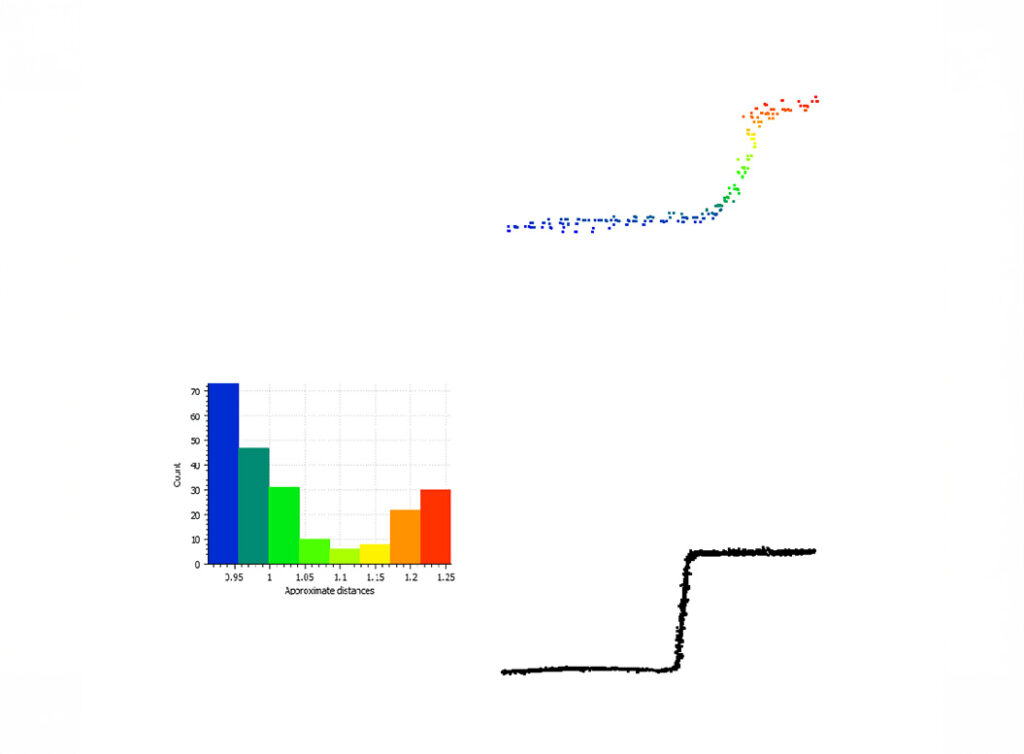
Vzdialenostná analýza je vizuálne prezentovaná pomocou mračien bodov. Referenčné mračno bodov je zobrazené čiernou farbou, zatiaľ čo porovnávané mračno bodov je farebne rozlíšené podľa odchýlok.
Súčasťou analýzy je aj histogram, ktorý znázorňuje rozloženie odchýlok. Os Y (Count) reprezentuje počet bodov, zatiaľ čo os X (Approximate distances) udáva intervaly vzdialeností od referenčného mračna bodov. Týmto spôsobom je možné vizuálne identifikovať presnosť a rozdiely medzi jednotlivými metódami zberu dát.
Obr. 2Porovnanie referenčného mračna bodov z terestrického skenera s mračnom bodov z LiDAR Zenmuse L1
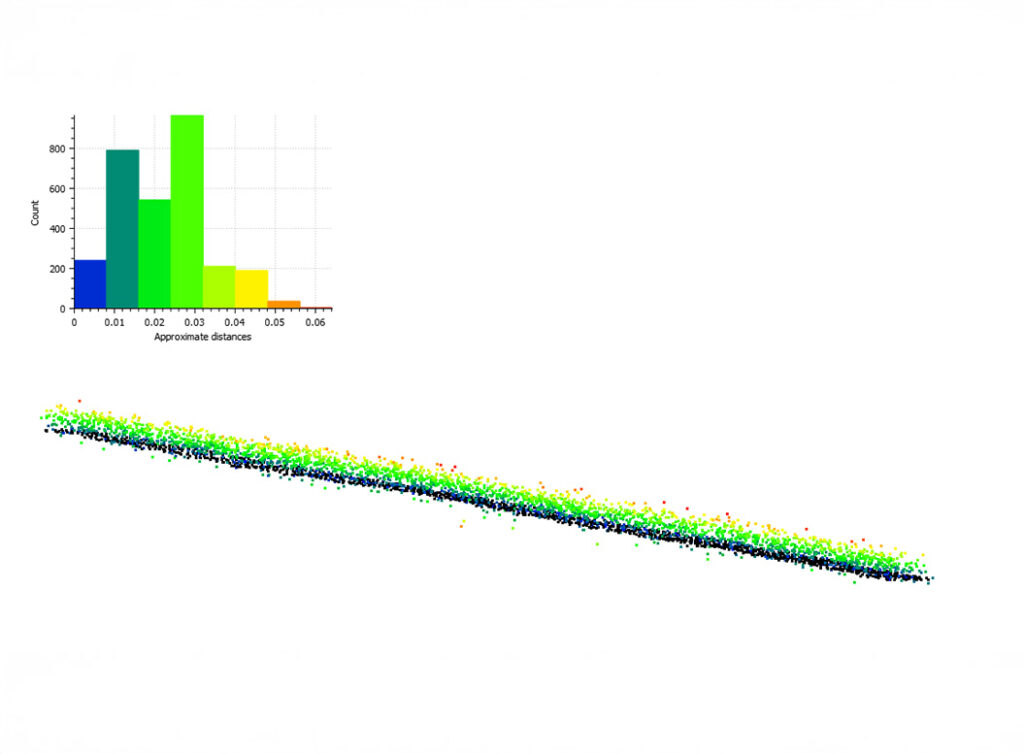
Obr. 3 Porovnanie referenčného mračna bodov z terestrického skenera s mračnom bodov z LiDAR Zenmuse L2
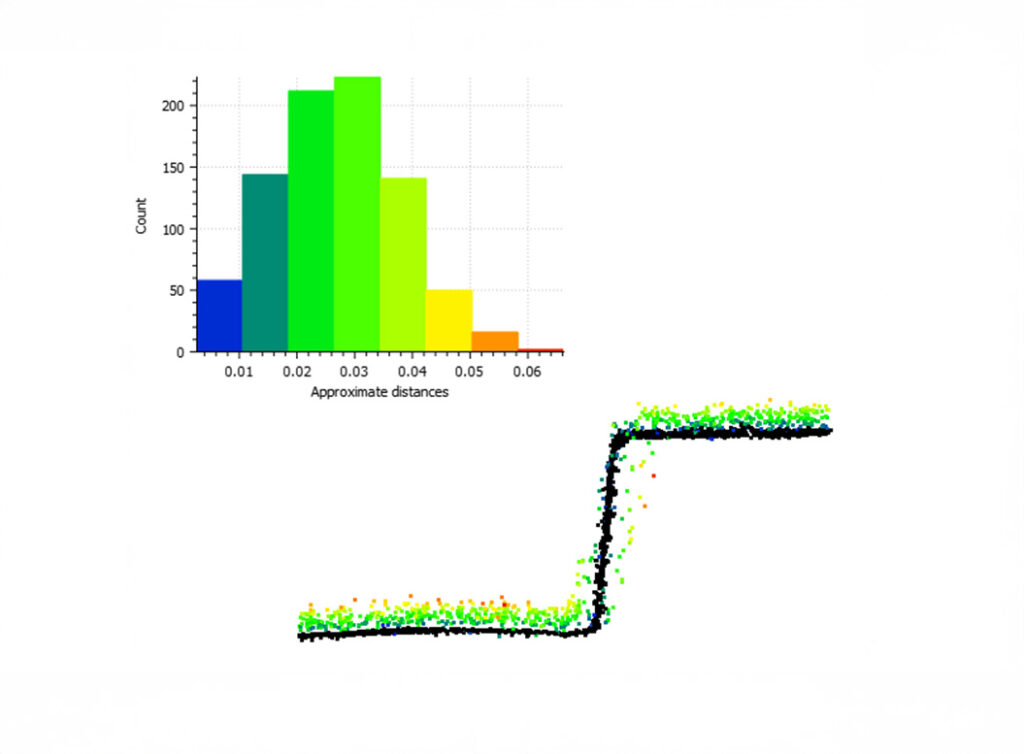
Obr. 4 Porovnanie referenčného mračna bodov z terestrického skenera s mračnom bodov získaným spôsobom Fotogrametria Oblique
Obr. 5 Porovnanie referenčného mračna bodov z terestrického skenera s mračnom bodov získaným spôsobom Fotogrametria Ortho
Aké číselné výsledky preukázala vzdialenostná analýza?
Tabuľka 1 poskytuje číselné vyjadrenie vzdialenostnej analýzy zobrazené na predošlých obrázkoch. MAX hodnota predstavuje najväčšiu nameranú odchýlku od referenčného mračna, čím poukazuje na maximálne rozdiely medzi porovnávanými metódami zberu dát. Priemerné hodnoty zároveň umožňujú lepšie pochopiť celkovú presnosť jednotlivých technológií.
Tab. 1 Zhrnutie výsledkov vzdialenostnej analýzy
Ako sa odzrkadlí presnosť meraní na celkovej výške objektu?
Na zistenie, či spôsob mapovania ovplyvňuje veľkosť (presnosť) zobrazených objektov, vykonali sme jednoduchú vzdialenostnú analýzu medzi dvoma typmi dát – referenčným a analyzovaným modelom.
Referenčné: z terestrického laserového skenovania
Analyzované: z fotogrametrie (misia Ortho, výška 90m)
Analýza prebehla na dvoch miestach – najnižšom bode (chodník) a najvyššom bode (strecha budovy), zobrazených na Obr.6.
Obr. 6 Vybrané body na analýzu výšky – chodník (najnižší bod) a strecha (najvyšší bod).
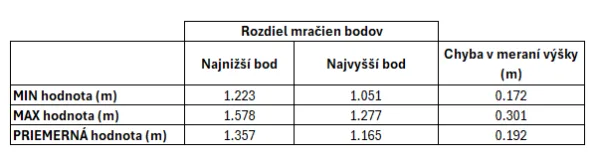
V Tabuľke 2 MIN/MAX hodnota predstavuje najmenší/najväčší rozdiel medzi modelmi. PRIEMERNÁ hodnota, priemerný rozdiel medzi modelmi – udáva odchýlku merania. Chyba v meraní výšky ukazuje rozdiel MIN, MAX a PRIEMERNOU hodnotou medzi strechou a chodníkom, teda ako veľmi sa líši výška budovy v modeli z fotogrametrie oproti realite.
Tab. 2 Porovnanie rozdielov výšky na vybraných bodoch
Z výsledkov vyplýva, že ak sa pri spracovaní fotogrametrie použijú len kolmé zábery, dochádza k významnej chybe v určení výšky objektov. Pri budove s výškou 13m predstavuje priemerná chyba 0.19m, čo už nie je zanedbateľné – najmä pri aplikáciách, ktoré vyžadujú vyššiu presnosť, ako je napríklad inžinierske zameranie alebo plánovanie výstavby.
Ako obstáli L1, L2, fotogrametria voči terestrickému skeneru?
Výsledky analýzy ukázali výrazné rozdiely v presnosti a vhodnosti jednotlivých metód pre rôzne typy meraní.
Terestrický skener poskytuje najvyššiu presnosť, no je časovo náročný a obmedzený dostupnosťou niektorých miest.
LiDAR – L1 dosahuje výrazne horšie výsledky ako L2, a preto je vhodnejší na meranie objemov než na presné zameranie stavieb. L2 je presnejší a spoľahlivejší pre detailné mapovanie.
Fotogrametria
– použitie iba kolmých snímok bez vlícovacích bodov vedie k výraznému skresleniu modelu, čo spôsobuje nepresnosti pri výpočte objemov.
– s kolmými a šikmými snímkami dosahuje presnosť porovnateľnú s LiDAR L2, čím sa stáva vhodnou alternatívou pri správnom nastavení parametrov zberu dát.